
Force-enhanced MR Remote Collaboration (2023)
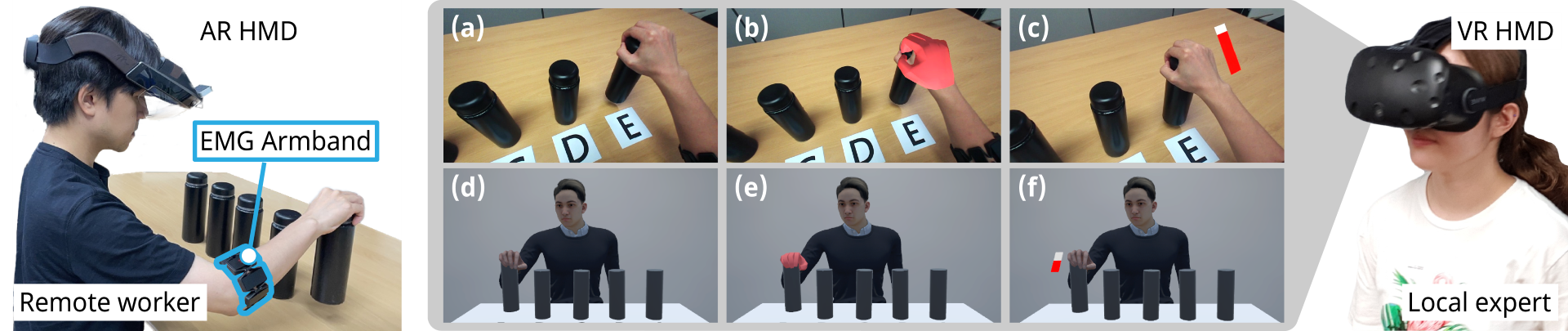
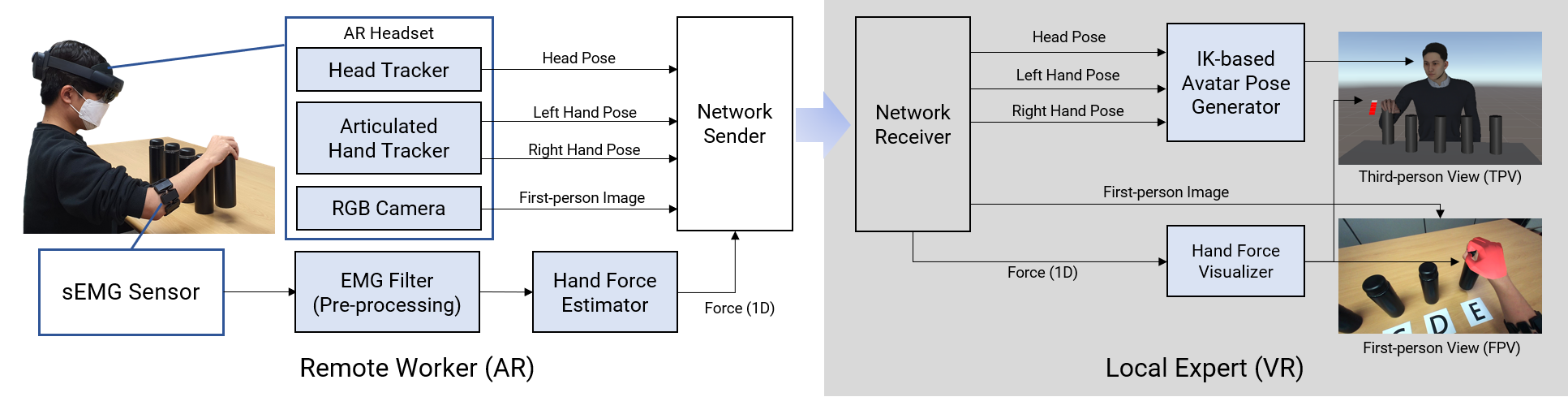
A prototype system for sharing a user's hand force in asymmetric 3D remote collaboration on physical tasks, where hand force is estimated using wearable surface electromyography sensors.
Publications
- Hyung-il Kim, Boram Yoon, Seo Young Oh, and Woontack Woo. (2023). "Visualizing Hand Force with Wearable Muscle Sensing for Enhanced Mixed Reality Remote Collaboration." IEEE Transactions on Visualization and Computer Graphics Link